- Deutsch
-
EnglishDeutschItaliaFrançais日本語한국의русскийSvenskaNederlandespañolPortuguêspolskiSuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикAfrikaansIsiXhosaisiZululietuviųMaoriKongeriketМонголулсO'zbekTiếng ViệtहिंदीاردوKurdîCatalàBosnaEuskeraالعربيةفارسیCorsaChicheŵaעִבְרִיתLatviešuHausaБеларусьአማርኛRepublika e ShqipërisëEesti Vabariikíslenskaမြန်မာМакедонскиLëtzebuergeschსაქართველოCambodiaPilipinoAzərbaycanພາສາລາວবাংলা ভাষারپښتوmalaɡasʲКыргыз тилиAyitiҚазақшаSamoaසිංහලภาษาไทยУкраїнаKiswahiliCрпскиGalegoनेपालीSesothoТоҷикӣTürk diliગુજરાતીಕನ್ನಡkannaḍaमराठी
Warum werden 120 Ω in Can -Bussystemen üblicherweise verwendet?
- 2024/12/30
- 30
Katalog
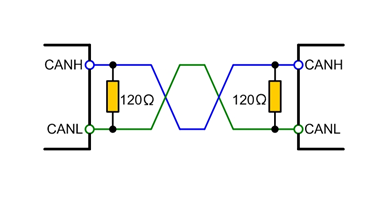
Abbildung 1. 120 Ω in CAN -Bussystemen
Die Rolle des Abschlusses von Widerständen in CAN -Bussystemen
Abschlüsse Widerstände sind wichtige Komponenten im effizienten und zuverlässigen Betrieb eines CAN -Bussystems (Controller Area Network).Sie erfüllen drei Kernfunktionen:
• Verbesserung der Anti-Interferenz-Leistung
• Gewährleistung des schnellen Übergangs in den rezessiven Zustand
• Verbesserung der Signalqualität
Untersuchen wir jede dieser Rollen im Detail und betonen die praktische Operation und deren Bedeutung in bestimmten Anwendungen.
Verbesserung der Anti-Interferenz-Leistung
In CAN -Bussystemen werden die Kommunikationszustände - dominant (Logik 0) und rezessiv (Logik 1) - vom Dose -Transceiver kontrolliert.Im dominanten Modus erzeugen interne Transceiver -Komponenten wie Q1 und Q2 einen Spannungsdifferential zwischen CanH (hoch) und Canl (niedrig).Im rezessiven Modus schalten sich diese Komponenten aus, was zu keinen Spannungsunterschieden zwischen den Linien führt.
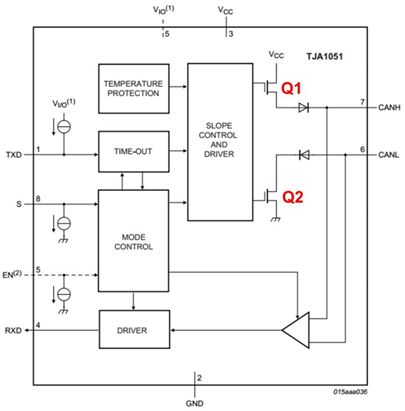
Abbildung 2. Interne Struktur von CAN
In einem entladenen Bus ist der Differentialwiderstand hoch und interne MOSFETs treten in einen Hochformanzzustand ein.Dies lässt das System anfällig für externe elektrische Rauschen.Beispielsweise kann ein Rauschen, das den Mindestschwellenwert des Transceivers überschreitet (nur 500 mV), den Bus in einen dominanten Zustand zwingen, was zu falschen Signalen und Datenbeschädigungen führt.Um dem entgegenzuwirken, wird ein Differentiallastwiderstand zwischen Canh und Canl platziert.Dieser Widerstand stabilisiert den Bus, indem er Rauschenergie absorbiert, insbesondere im rezessiven Zustand.Der Widerstandswert erfordert jedoch eine sorgfältige Auswahl:
- - Zu hoch, und es wird nicht effektiv Störungen entgegenwirken.
- - Zu niedrigund es wird übermäßigen Strom ziehen und die Fähigkeit des Systems beeinträchtigen, den dominanten Zustand effektiv zu behaupten.
Dieses Gleichgewicht sorgt für eine stabile Kommunikation und minimiert gleichzeitig den Stromverbrauch - eine kritische Überlegung in Automobil- und Industrieumgebungen.
Sicherstellen Sie einen schnellen Übergang zum rezessiven Zustand
Während des dominanten Staatsbetriebs werden parasitäre Kapazitäten in den Buslinien belastet.Um den Übergang in den rezessiven Zustand zurückzugewinnen, müssen diese Kapazitäten entlastet werden.Wenn kein Lastwiderstand vorhanden ist, hängt die Entladung ausschließlich auf den internen Widerstand des Transceivers ab, der aufgrund der RC -Zeitkonstante zu einer langsameren Entladung und verlängerten Übergangszeiten führt.
Mit einer 500 -kbit / s -Bitrate und einer parasitären Kapazität von 220 PF ist der Übergang von dominant zu rezessiv langsam.Diese Verzögerung manifestiert sich als langwierige fallende Kante in der Signalwellenform.
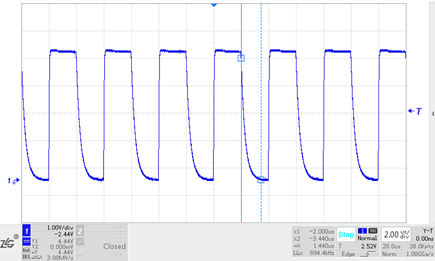
Abbildung 3. Signalwellenform bei 500 kbit / s parasitärer Kapazitätsentladung
Durch das Hinzufügen eines 60-Ohm-Widerstands zwischen CANH und CANL verkürzt die Entladungszeit erheblich.Die Übergangszeit wird auf 128 ns verkürzt und stimmt eng mit der dominanten staatlichen Absetzzeit überein.
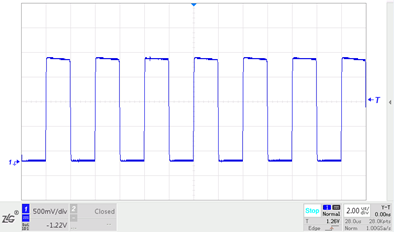
Abbildung 4. Signalwellenform nach Zugabe von 60 Ohm Widerstand
Diese schnellere Entlassung verbessert die allgemeine Reaktionsfähigkeit des Busses und sorgt für den zeitnahen Datenaustausch-eine kritische Anforderung für Hochgeschwindigkeits-Automobil- und industrielle Kommunikationssysteme.
Verbesserung der Signalqualität
Die Signalqualität in CAN -Bussystemen kann sich aufgrund von Reflexionen verschlechtern, die durch Impedanzfehlanpassungen verursacht werden.Diese Fehlanpassungen treten auf, wenn sich die charakteristische Impedanz des Getriebekabels ändert, häufig aufgrund von Schwankungen der Kabelgeometrie.Die Energie aus der Signalkante reflektiert zurück in den Bus und erzeugt Schwingungen oder "Klingeln", die die Wellenform verzerren können.
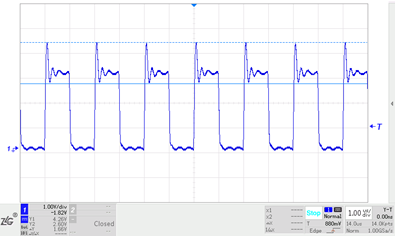
Abbildung 5. Klingeln am steigenden Rand in 1 Mbit / s können mit 10 m verdrehtem Paar signalisieren
Ringing stellt zwei bedeutende Risiken dar:
- Es überlagert das ursprüngliche Signal und erhöht die Wahrscheinlichkeit von Fehlern.
- Es reduziert die Kommunikationszuverlässigkeit, insbesondere bei höheren Datenraten.
Beenden Widerstände, die mit der charakteristischen Impedanz des Kabels übereinstimmen (typischerweise 120 Ohm in Automobildosesystemen), absorbieren die reflektierte Energie und verhindern das Klingeln.In einem System, das bei 1 Mbit / s mit einem 10-Meter-Kabel mit einem 10-Meter-Pair-Kabel arbeitet, beseitigt das Hinzufügen eines 120-Ohm-Widerstands an jedem Kabelende das Klingeln vollständig.Ohne diese Widerstände weist die steigende Kante des Signals signifikante Schwingungen auf, was die Integrität der Datenübertragung gefährdet.
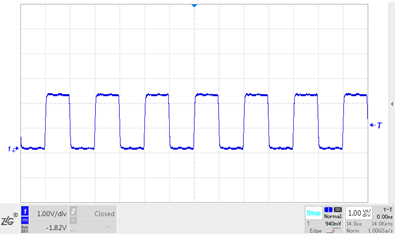
Abbildung 6. Signal ohne Klingeln nach 120 € Terminierung
Das Hinzufügen eines 120 € -widerstands zum Ende des verdrehten Paares verbessert die Signalwellenform signifikant und eliminiert das Klingeln.
Warum wird 120 Ω empfohlen?
Die Auswahl eines 120 Ω -Abschlusswiderstands im Controller Area Network (CAN) -Bussystem ist nicht willkürlich.Es ist tief in elektrischen Prinzipien verwurzelt und sowohl durch praktische Experimente als auch durch Branchenstandards definiert.Das Verständnis dieser Wahl erfordert die Erforschung des Impedanzkonzepts, ihrer Messung und ihrer Rolle bei der Gewährleistung der Effizienz und Zuverlässigkeit von CAN -Buskommunikation.
Impedanz verstehen
Impedanz ist die Opposition, die eine Schaltung dem Fluss des Wechselstroms (AC) vorsieht, gemessen in Ohms (ω).Es ist eine komplexe Menge, dargestellt als z = r+i (l-1/c), wobei:
R (Widerstand): Die tatsächliche Komponente der Impedanz, die Opposition aufgrund rein resistiver Elemente darstellt.
L (induktive Reaktanz): Repräsentiert Opposition aufgrund der induktiven Elemente der Schaltung.
C (kapazitive Reaktanz): Repräsentiert Opposition aufgrund der Kapazität in der Schaltung.
In einfachen Worten macht Impedanz sowohl die Widerstand als auch die reaktiven (induktiven und kapazitiven) Effekte in einer Schaltung aus.Zusammen definieren diese Komponenten, wie effizient ein Wechselstromsignal durch ein System wie einen Can -Bus fliegen kann.
Messung der charakteristischen Impedanz
Die charakteristische Impedanz eines Kabels, einer intrinsischen Eigenschaft, hängt von seiner Geometrie, seinem Leiterabstand und dem dielektrischen Material zwischen den Leitern ab.Diese Impedanz praktisch zu messen:
Setup: Ein Ende des Kabels ist an einen Quadratwellengenerator angeschlossen.Das andere Ende ist mit einem einstellbaren Widerstand verbunden.
Beobachtung: Die Wellenform über den Widerstand wird unter Verwendung eines Oszilloskops überwacht.
Einstellung: Der Wert des Widerstands wird abgestimmt, bis die Wellenform zu einer sauberen Quadratwelle wird, frei von Klingeln oder Verzerrungen.Zu diesem Zeitpunkt entspricht der Wert des Widerstands mit der charakteristischen Impedanz des Kabels.In Kabeln mit verdrehten Pair-Kabeln, die üblicherweise in CAN-Systemen verwendet werden, misst die charakteristische Impedanz konsistent um 120 Ω.
Warum wird 120 Ω empfohlen?Der Wert von 120 Ω ist nicht willkürlich;Es basiert sowohl auf praktischen Tests als auch auf Branchenstandards.Das Testen von Twisted-Pair-Automobilkabeln zeigt durchweg eine charakteristische Impedanz von etwa 120 Ω.Die Verwendung eines Terminierungswiderstands, der mit diesem Wert übereinstimmt, minimiert Signalreflexionen und sorgt für eine reibungslose Datenübertragung.Zusätzlich gibt der ISO 11898-2 Standard, der Can-Bus-Systeme reguliert, die 120 Ω-Terminierung an.Diese Standardisierung garantiert die Kompatibilität, reduziert Fehler und gewährleistet eine zuverlässige Kommunikation über verschiedene Geräte und Systeme hinweg.
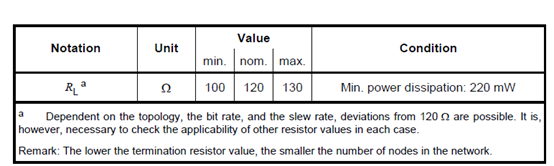
Abbildung 7. Spezifikationen des Terminierungswiderstands
Berücksichtigung alternativer Terminierungswiderstände
Der Standardwiderstand von 120 Ω für CAN -Bussysteme ist weithin akzeptiert, ist jedoch für alle Szenarien keine feste Anforderung.Einige Anwendungen können unterschiedliche Widerstandswerte erfordern, aber alle Änderungen müssen mit Vorsicht angegangen werden, da sie sich auf die Zuverlässigkeit und Leistung des Systems auswirken können.Hier sind Situationen, in denen alternative Widerstandswerte berücksichtigt werden können und die Faktoren, die diese Entscheidungen beeinflussen.
• Kurzstreckenkommunikation: Für kurze Kommunikationsabstände mit weniger verbundenen Geräten ist die Signalreflexion weniger ein Problem.In solchen Fällen sind Signalqualitätsprobleme wie Klingeln oder Dämpfung weniger wahrscheinlich.Verwenden Sie alternative Widerstandswerte oder platzieren Sie einen Widerstand nur an einem Ende des Busses.Dieser Ansatz muss jedoch gründlich getestet werden, um sicherzustellen, dass der Bus stabil bleibt und wie beabsichtigt funktioniert.
• Niedriggeschwindigkeitskommunikation: In niedrigen Geschwindigkeiten können Netzwerke mit langsameren Datenübertragungsraten von Signalverzerrungen und Abschwächung weniger kritisch sind.Die reduzierte Geschwindigkeit bietet mehr Spielraum für das Timing und die Signalintegrität und ermöglicht eine gewisse Flexibilität mit Widerstandswerten.Verwenden Sie einen etwas höheren oder niedrigeren Widerstand für den geeigneten spezifischen Anforderungen. Diese Anpassungen müssen jedoch umfangreiche praktische Tests unterzogen werden, um zu bestätigen, dass sie die Kommunikationszuverlässigkeit nicht schädigen.
• Spezielle Anwendungen: In Umgebungen mit einzigartigen Anforderungen wie Hochfrequenzkommunikation oder starken elektromagnetischen Interferenzen (EMI) funktioniert die Standardabnahme von 120 Ω möglicherweise nicht effektiv.Das Einstellen des Widerstandswerts in solchen Szenarien kann die elektromagnetische Kompatibilität (EMC) verbessern und vor externen Interferenzen schützen.Das Anpassen des Widerstandes für diese Bedingungen gewährleistet die Systemstabilität, ohne die Leistung zu beeinträchtigen.
Warum 0,25W für Strom wählen?
Die Auswahl einer 0,25 -W -Leistungsbewertung für die Beendigung von Widerständen in CAN -Bussystemen berücksichtigt potenzielle Fehlerszenarien in ECU -Schnittstellen für Automobile.Dazu gehören Kurzschlüsse der Stromversorgung oder des Masses, gemäß den Standardspezifikationen.Wenn beispielsweise ein CAN-Busknoten einen 18-V-Kurzschluss auf Canh erfährt, fließt der Strom durch den terminierenden Widerstand zu CANL.Der TJA1145 -Transceiver begrenzt diesen Strom auf maximal 50 mA.Bei diesem Strom wird die Leistungsdissipation in einem 120 Ω -Widerstand als 50 mA × 50 mA × 120 Ω = 0,3 W berechnet.Während ein 0,25-W-Widerstand typische Operationen bewältigen kann, können Hochtemperaturbedingungen zu einer Derierung führen, wobei die wirksame Leistungsverarbeitung des Widerstands abnimmt.In solchen Fällen wäre ein 0,5 -W -Widerstand besser geeignet, um eine sichere und zuverlässige Leistung zu gewährleisten.
Abschluss
Zusammenfassend lässt sich sagen, dass der 120 Ω -terminierende Widerstand ein Eckpfeiler zuverlässiger Can -Bussysteme ist, um eine reibungslose Kommunikation, Signalintegrität und Rauschreduzierung zu gewährleisten.Während seine Verwendung standardisiert ist, hilft das Verständnis seiner Rolle bei der Fehlerbehebung und Optimierung der Leistung in verschiedenen Szenarien.Alternative Widerstandswerte oder Leistungsbewertungen wie 0,25W können für bestimmte Anwendungen in Betracht gezogen werden, diese müssen jedoch streng getestet werden, um die Zuverlässigkeit aufrechtzuerhalten.Durch die Ausrichtung der Kündigungsentscheidungen auf Branchenstandards und praktische Anforderungen können Sie ein robustes und effizientes CAN -Busnetz aufbauen, das den Anforderungen moderner Automobil- und Industriesysteme entspricht.
Häufig gestellte Fragen [FAQ]
1. Was bedeutet Can Bus?
Das CAN-Bus- oder Controller Area-Netzwerk ist ein iso standardisiertes serielles Kommunikationsprotokoll für den nahtlosen Datenaustausch zwischen elektronischen Steuereinheiten (ECUs) in Fahrzeugen.Es wurde zunächst für Automobilanwendungen entwickelt und ermöglicht ein integriertes Netzwerk zum Verwalten verschiedener Funktionen wie Motorleistung und Sicherheitssysteme.Im Laufe der Zeit haben seine Zuverlässigkeit und Anpassungsfähigkeit einen beliebten Feldbus in Branchen wie Automatisierung, Luft- und Raumfahrt und medizinischen Geräten gemacht.
2. Ist der Can Bus Full-Duplex oder Halbduplex?Kann es gleichzeitig Daten senden und empfangen?
Der CAN-Bus arbeitet im halben Duplex-Modus, sodass er zwischen Senden und Empfangen von Daten wechseln kann, aber nicht beide gleichzeitig auszuführen.Dieser Mechanismus sorgt für eine robuste Kommunikation, indem Kollisionen verhindert und die Datenintegrität aufrechterhalten werden, was es zu einem effizienten Protokoll für gemeinsame Kommunikationskanäle macht.
3. Wie verbindet ich den Can -Bus?
Um ein CAN -Bussystem anzuschließen, fügen Sie zunächst das positive Anschluss der Stromversorgung des Geräts an die konstante Stromquelle des Fahrzeugs und die negative Klemme an den negativen Pol der Fahrzeugbatterie an.Verknüpfen Sie als Nächstes den ACC -Terminal des CAN -Geräts mit der Zubehörleistung des Fahrzeugs (ACC), um sicherzustellen, dass das System mit dem Zubehör des Autos aktiviert wird.Schließen Sie zur Kommunikation die CANH- und CANL -Leitungen des Geräts an den Bus an und installieren Sie 120 Ω -Widerstände an beiden Enden des Busses, um die Signalintegrität aufrechtzuerhalten und Reflexionen zu verhindern.
Verwandter Blog
-
Netzteilspannung Abkürzung: VCC VDD VEE VSS GND

2024/06/6
Im modernen elektronischen Schaltungsdesign, Verständnis der Abkürzungen der Stromversorgungsspannung (wie VCC, VDD, VEE, VSS, GND).Diese Abkürzung... -
Ein Überblick über TTL- und CMOS -ICs und wie Sie zwischen ihnen wählen

2024/04/13
In diesem Artikel werfen wir einen detaillierten Blick auf zwei wichtige elektronische Technologien, komplementäre Metaloxid-Halbleiter (CMOS) und Tr... -
Verschiedene Arten von Sicherungen und Anwendungen

2024/04/18
Sicherungen sind wesentliche Komponenten in modernen elektrischen Systemen und fungieren als entscheidende Beschützer vor Überstrom.Sie arbeiten, in... -
Verständnis des C1815 -Transistors: Pinouts, Schaltungssymbole, Anwendungsschaltungen

2023/12/20
Welche Art von Röhre ist der C1815?C1815 Triode PinoutC1815 ModellzeichnungC1815 -ParameterC1815 EigenschaftenAnwendung von C1815 Der C1815 -Transist... -
LR44 -Batterien: LR44 -Batterieäquivalente und LR44 -Batterieersatz

2024/01/24
In einem sich schnell entwickelnden technologischen Gebiet, in dem die Größe der elektronischen Geräte weiter schrumpfen und dennoch alltäglicher ... -
Grundkenntnisse über Sicherungen: Merkmale, Arbeitsprinzipien, Typen und wie man richtig auswählt

2024/04/10
Sicherungen schützen Schaltungen vor Schäden aufgrund von Überlastung oder Kurzstrecken.Dieses einfache, aber geniale Gerät basiert auf einem leic... -
Leitfaden zu Buck-, Boost- und Buck-Boost-Konverter

2023/12/21
Was ist ein Buck -Konverter?Wie funktioniert ein Buck Converter?Was ist ein Boost -Konverter?Wie funktioniert ein Boost -Konverter?Was ist ein Auftrie... -
Gesamtzahl der Transistoren in einer CPU
2024/06/14
In der modernen Computertechnologie ist die Beziehung zwischen der zentralen Verarbeitungseinheit (CPU) und den Transistoren zunehmend integraler gewo... -
Beschreiben Sie kurz die Spezifikationen, Verpackungen, das Arbeitsprinzip, die Vorteile und die Umweltauswirkungen von Lithium-Ionen-Batterien

2024/03/20
Seit der Einführung von wiederaufladbaren Blei-Säure-Batterien im Jahr 1859 wurden sie allmählich in den Gewebe des technologischen Fortschritts ei... -
Grunde elektronische Grundkomponenten verstehen - Widerstände, Kondensatoren, Dioden, Transistoren, Induktoren und digitale Logik -Tore
2024/04/13
Elektronische Komponenten sind der Eckpfeiler des Bauens und der Optimierung elektronischer Schaltkreise.Von gewöhnlichen Haushaltsgeräten bis hin z... -
Beherrschen analoge und digitale Schaltungen: Ein Anfängerführer

2023/12/20
Definition und Eigenschaften von analogen Schaltungen und digitalen SchaltungenDer Unterschied zwischen analogen Schaltungen und digitalen Schaltungen... -
Transistor (BJT und MOSFET) Arbeitsprinzipien

2023/12/20
Arbeitsprinzip des bipolaren Junction -Transistors (BJT)Auswahl der KomponentenwerteWie wählen Sie einen Transistor?Arbeitsprinzip von MOSFETWie scha... -
Eine vollständige Liste von Testmethoden für verschiedene Transistoren

2023/12/20
Der Transistor wurde von John Bardeen, William Shockley und Walter Brattain erfunden.Es handelt sich um ein Kollektor-, Emitter- und Basis-Drei-termin...
Heiße Teile
- C0402C0G1C560K020BC
- TMJ107BB7473KAHT
- C0603C0G1E4R5C030BG
- CL10F104ZO8NNND
- GRM1885C1H6R5CA01D
- 06031A6R0DAT4A
- 04025A200FAT2A
- GQM2195C2E9R1BB12D
- SMA6J15CA-TR
- SMDJ20A
- RTR030N05TL
- AD7776AR-REEL
- 5AGZME7H3F35C4N
- AT90USB646-MUR
- MAX214CWI
- INA139QPWRG4Q1
- MAX809SEXR+T
- MMPF0100NPAEP
- TMS320F2812GHHA
- MKE02Z32VQH2
- MPC8347VRADDB
- PI3VDP411LSRZBEX
- LM2601MTC
- LT3751EUFD#PBF
- NCV4276CDT50RKG
- SFH690ABT
- AQW212EHA
- VI-J6Y-EX
- 7MBR25SA120D
- VI-260-CU-15
- VI-ANN-C/SQ
- TL16C752B
- AD7344ASTZ
- SI4532ADY
- LM3421Q0MH
- SAF-C505C-2RM
- LE28FW8203T-70B-MPB-E
- LTC3448EMS8E#TR
- BCM5238UA3KQM-P13
- IDT7027L20PFI
- RTD2120S
- T491A226M006ZT7280
- T491B475K010AH48507111
- HIF3MAW-30D-2.54R
- XCKU11P-2FFVD900I
- MPC8260AZUKHBA
- PEB20550HV2.1
- MY9231TE