- Deutsch
-
EnglishDeutschItaliaFrançais日本語한국의русскийSvenskaNederlandespañolPortuguêspolskiSuomiGaeilgeSlovenskáSlovenijaČeštinaMelayuMagyarországHrvatskaDanskromânescIndonesiaΕλλάδαБългарски езикAfrikaansIsiXhosaisiZululietuviųMaoriKongeriketМонголулсO'zbekTiếng ViệtहिंदीاردوKurdîCatalàBosnaEuskeraالعربيةفارسیCorsaChicheŵaעִבְרִיתLatviešuHausaБеларусьአማርኛRepublika e ShqipërisëEesti Vabariikíslenskaမြန်မာМакедонскиLëtzebuergeschსაქართველოCambodiaPilipinoAzərbaycanພາສາລາວবাংলা ভাষারپښتوmalaɡasʲКыргыз тилиAyitiҚазақшаSamoaසිංහලภาษาไทยУкраїнаKiswahiliCрпскиGalegoनेपालीSesothoТоҷикӣTürk diliગુજરાતીಕನ್ನಡkannaḍaमराठी
Die Grundlagen von synchronen Motoren
- 2024/10/3
- 291
Katalog

Arbeitsprinzip des synchronen Motors
Der Betrieb eines synchronen Motors basiert auf der Wechselwirkung zwischen Stator und Rotor.Wenn ein Dreiphasen-Wechselstrom auf die Statorwicklungen aufgetragen wird, entsteht ein rotierendes Magnetfeld.Der von einem Gleichstrom angetriebene Rotor richtet sich an dieses rotierende Magnetfeld aus, ähnlich wie ein Magnet mit einem anderen Magnetfeld ausrichtet.Diese Synchronisation stellt sicher, dass sich der Rotor mit der gleichen Geschwindigkeit wie das Magnetfeld des Stators dreht und selbst wenn sich die Last ändert.Das Drehmoment, das die Kraft ist, die den Motor dreht, stammt aus der magnetischen Wechselwirkung zwischen dem Feld des Rotors und dem rotierenden Feld des Stators.
V-förmige Kurve eines synchronen Motors
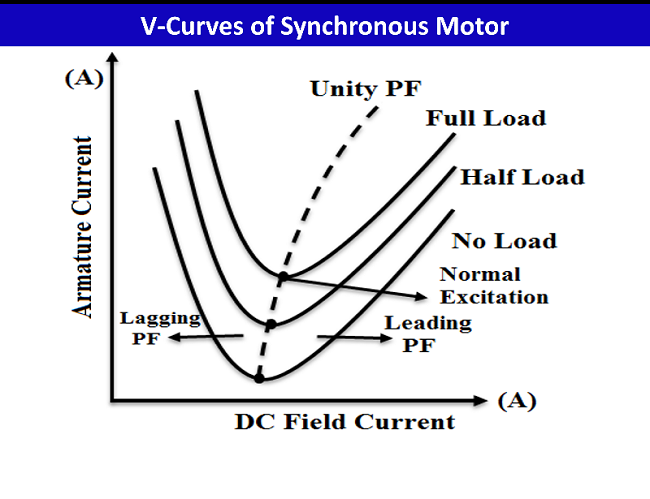
Die V-förmige Kurve zeigt die Beziehung zwischen dem Ankerstrom (i1) und dem Anregungsstrom (if), wenn Spannung und Last konstant sind.
• Der niedrigste Punkt in der Kurve zeigt den minimalen Ankerstrom an, der einen Einheitsleistungfaktor darstellt, der als normaler Anregungspunkt bekannt ist.
• Wenn der Motor links von diesem Punkt operiert, ist er unterzogen.Wenn es nach rechts arbeitet, wird es übertroffen.
• Überanregung ist nützlich, wenn der Motor dem Netz reaktive Leistung liefern muss, wodurch der Leistungsfaktor verbessert wird.
• Eine normale Anregung eignet sich am besten für eine optimale motorische Effizienz, wenn der Stromfaktor des Netzes bereits ausreicht.
Startmethoden des synchronen Motors
Synchronmotoren können keine herkömmlichen Methoden anwenden, da sie synchronisieren müssen, um Drehmoment zu erzeugen.Hier sind einige effektive Lösungen:
Verwenden eines Hilfsmotors
Eine Methode besteht darin, einen kleineren asynchronen Motor zu verwenden, um den synchronen Motor auf knapp unter seiner synchronen Geschwindigkeit zu beschleunigen, bevor er an die Last angeschlossen wird.Dieser Ansatz ist in industriellen Umgebungen, in denen Zuverlässigkeit erforderlich ist, üblich.
Variable Frequenzleistung Versorgung
Eine andere Methode besteht darin, den Rotor zunächst mit einem Gleichstrom zu versorgen und dann die Frequenz mithilfe einer variablen Frequenzleistung nach und nach zu erhöhen.Dies ermöglicht eine reibungslose Beschleunigung der Synchrongeschwindigkeit, was für die präzise Geschwindigkeitsregelung während des Starts nützlich ist.
Asynchroner Start
Diese Methode umfasst eine Eichhörnchen -Käfigwicklung im Rotor, um das erforderliche Startdrehmoment bereitzustellen.Die Synchronisation tritt auf, sobald der Rotor die Synchrongeschwindigkeit nähert.Dieser Ansatz verwendet einfache mechanische Komponenten und macht es zu einer effektiven und praktischen Lösung.
Arten von synchronen Motoren
DC-aufgeregte Synchronmotoren
DC-aufgeregte Synchronmotoren haben einen Rotor mit Feldspulen, die wie ein Batterie oder einen Gleichstromgenerator mit Strom versorgt werden.Zu Beginn hat der Rotor eine Eichhörnchen-Käfig-Wicklung, die ihm hilft, die Synchrongeschwindigkeit zu erreichen, die der vom Stator erzeugten Geschwindigkeit des Magnetfeldes entspricht.Dieses Setup sorgt für einen reibungslosen Übergang zum synchronen Betrieb.
Für industrielle Anwendungen ist eine Präzision in der Geschwindigkeitskontrolle erforderlich, da die von DC angeregten Synchronmotoren eine hervorragende Stabilität und Kontrolle bieten.Dies gilt bereits in großen Fertigungsumgebungen, in denen eine konsistente Motordrehzahl die Produktion reibungslos verläuft.Diese Motoren sind bekannt für ihre Haltbarkeit und die zuverlässige Leistung, was sie ideal für Situationen macht, in denen jede Geschwindigkeitsänderung die Produktion stören könnte.
Nicht-DC-auferlegte Synchronmotoren
Nicht-DC-erregte Synchronmotoren verwenden einen Eichhörnchen-Cage-Rotor und sind ähnlich zu Split-Phasen- oder Multiphasenmotoren ausgelegt.Sie synchronisieren mit dem Magnetfeld des Stators, ohne eine externe Gleichstromquelle zu benötigen.
Diese Motoren sind dank ihres einfachen Designs und ihrer Wartungsbedürfnisse in Einstellungen, in denen DC Power möglicherweise nicht ohne weiteres verfügbar ist, von Vorteil.Beispielsweise werden sie häufig in HLK -Systemen verwendet, in denen Energieeffizienz und minimale Unterhaltshalte wichtig sind.
Jüngste Entwicklungen in der Energiespeicherung und erneuerbare Energien legen nahe, dass Hybridsysteme, die DC und Nicht-DC-Anregung kombinieren, die Flexibilität und Leistung von synchronen Motoren verbessern können.Das Verständnis der Unterschiede zwischen von DC angeregten und nicht dc-angeregten Motoren ist erforderlich, um die Effizienz und Wartung in verschiedenen Branchen zu optimieren.
Anwendungen des synchronen Motors
Synchronmotoren werden in Branchen häufig eingesetzt, die eine hohe Stabilität und Präzision erfordern.Sie behalten unabhängig von Laständerungen eine konstante Geschwindigkeit bei, sodass sie für Maschinen wie Gebläse und Wasserpumpen in Sektoren wie Abwasserbehandlung und chemischer Verarbeitung erforderlich sind.
In der Fertigung leisteten Synchronmotoren wie Kugelmühlen und Kompressoren, um eine konsistente Produktqualität zu gewährleisten und Abfall zu reduzieren.Sie können auch den Leistungsfaktor in elektrischen Systemen verbessern und zu niedrigeren Energiekosten führen.
Diese Motoren eignen sich hervorragend zum Synchronisieren mehrerer Maschinen, zur Reduzierung des Verschleißes und zur Minimierung der Ausfallzeiten.Sie funktionieren gut mit modernen Überwachungssystemen, die tatsächliche Anpassungen ermöglichen und den Wartungsbedarf vorhersagen, was zu niedrigeren Wartungskosten und zu einer erhöhten Betriebszeit für die Betriebszeit führt.
Abschluss
Synchronmotoren sind eine Hauptkomponente in verschiedenen industriellen Anwendungen, da sie unabhängig von Lastschwankungen eine konstante Geschwindigkeit aufrechterhalten können.Ihr Betrieb basiert auf der genauen Wechselwirkung zwischen Stator und Rotor, die eine zuverlässige Leistung und Effizienz gewährleistet.Die beiden Haupttypen DC-aufgeregten und nicht dc-erregten Synchronmotoren bieten unterschiedliche Vorteile, was sie für verschiedene Einstellungen geeignet macht.Synchronmotoren übertreffen in Anwendungen, die Stabilität und Präzision erfordern, wie z. B. Herstellung, Wasseraufbereitung und HLK -Systeme.Ihre Fähigkeit, den Leistungsfaktor zu verbessern und mehrere Maschinen zu synchronisieren, verbessert ihren Wert in modernen industriellen Rahmenbedingungen weiter.Die einzigartigen Merkmale von synchronen Motoren machen sie für die Optimierung der Leistung, die Reduzierung der Kosten und die Gewährleistung einer konsistenten Leistung in der heutigen Wettbewerbsumgebung.
Häufig gestellte Fragen [FAQ]
1. Wo wird ein synchroner Motor verwendet?
Synchronmotoren werden in Anwendungen verwendet, die konstante und präzise Geschwindigkeiten erfordern.In der Regel befinden sich diese Motoren mit geringer Leistung in Positionierungsmaschinen, bei denen Genauigkeit erforderlich ist.Sie spielen auch eine große Rolle bei Roboteraktuatoren und bieten eine Bewegungskontrolle für verschiedene Roboteraufgaben.Über industrielle Umgebungen hinaus werden synchrone Motoren in Ballmühlen, Uhren, Rekordakteuren und Plattenspielern eingesetzt, die ihre Vielseitigkeit in mechanischen und elektronischen Systemen demonstrieren.
2. Was ist der Hauptnachteil von synchronen Motoren?
Ein Hauptnachteil von synchronen Motoren ist ihr Bedürfnis nach DC -Anregung aus externen Quellen, was deren Betrieb Komplexität verleiht.Sie starten auch nicht und erfordern zusätzliche Anordnungen zum Starten und Synchronisieren.Diese Komplexität kann zu höheren Installations- und Betriebskosten führen.Darüber hinaus sind die Kosten pro Kilowattausgang von synchronen Motoren im Allgemeinen höher als die von Induktionsmotoren, was sie für einige Anwendungen weniger wirtschaftlich wirtschaftlich macht.
3. Was ist der Unterschied zwischen einem synchronen Motor und einem synchronen Generator?
Der Unterschied zwischen einem synchronen Motor und einem synchronen Generator ist ihre Funktion.Ein synchroner Motor wandelt elektrische Energie in mechanische Energie um, während ein synchroner Generator mechanische Energie in elektrische Energie umwandelt.Diagramme, die jede veranschaulichen, zeigen, dass ein synchroner Generator mit einem unendlichen Bus links angeschlossen ist, während sich ein synchroner Motor rechts befindet.In beiden Fällen behält der unendliche Bus eine feste Spannung und Frequenz bei, unabhängig von der Leistung des Prime Movers und der Anregung der Maschine.Dieser Unterschied definiert ihre jeweilige Rolle in elektrischen Systemen.
Verwandter Blog
-
Netzteilspannung Abkürzung: VCC VDD VEE VSS GND

2024/06/6
Im modernen elektronischen Schaltungsdesign, Verständnis der Abkürzungen der Stromversorgungsspannung (wie VCC, VDD, VEE, VSS, GND).Diese Abkürzung... -
Ein Überblick über TTL- und CMOS -ICs und wie Sie zwischen ihnen wählen

2024/04/13
In diesem Artikel werfen wir einen detaillierten Blick auf zwei wichtige elektronische Technologien, komplementäre Metaloxid-Halbleiter (CMOS) und Tr... -
Verschiedene Arten von Sicherungen und Anwendungen

2024/04/18
Sicherungen sind wesentliche Komponenten in modernen elektrischen Systemen und fungieren als entscheidende Beschützer vor Überstrom.Sie arbeiten, in... -
Verständnis des C1815 -Transistors: Pinouts, Schaltungssymbole, Anwendungsschaltungen

2023/12/20
Welche Art von Röhre ist der C1815?C1815 Triode PinoutC1815 ModellzeichnungC1815 -ParameterC1815 EigenschaftenAnwendung von C1815 Der C1815 -Transist... -
LR44 -Batterien: LR44 -Batterieäquivalente und LR44 -Batterieersatz

2024/01/24
In einem sich schnell entwickelnden technologischen Gebiet, in dem die Größe der elektronischen Geräte weiter schrumpfen und dennoch alltäglicher ... -
Leitfaden zu Buck-, Boost- und Buck-Boost-Konverter

2023/12/21
Was ist ein Buck -Konverter?Wie funktioniert ein Buck Converter?Was ist ein Boost -Konverter?Wie funktioniert ein Boost -Konverter?Was ist ein Auftrie... -
Gesamtzahl der Transistoren in einer CPU
2024/06/14
In der modernen Computertechnologie ist die Beziehung zwischen der zentralen Verarbeitungseinheit (CPU) und den Transistoren zunehmend integraler gewo... -
Grundkenntnisse über Sicherungen: Merkmale, Arbeitsprinzipien, Typen und wie man richtig auswählt

2024/04/10
Sicherungen schützen Schaltungen vor Schäden aufgrund von Überlastung oder Kurzstrecken.Dieses einfache, aber geniale Gerät basiert auf einem leic... -
Wie viele Spannungen sollte eine Autokatterie haben?

2024/08/25
Ist es wirklich genug zu sagen, dass eine Batterie bei 11,9 Volt oder höher "vollständig aufgeladen" ist?Diese Zahl bietet eindeutig eine Grundlinie... -
Grunde elektronische Grundkomponenten verstehen - Widerstände, Kondensatoren, Dioden, Transistoren, Induktoren und digitale Logik -Tore
2024/04/13
Elektronische Komponenten sind der Eckpfeiler des Bauens und der Optimierung elektronischer Schaltkreise.Von gewöhnlichen Haushaltsgeräten bis hin z... -
Beherrschen analoge und digitale Schaltungen: Ein Anfängerführer

2023/12/20
Definition und Eigenschaften von analogen Schaltungen und digitalen SchaltungenDer Unterschied zwischen analogen Schaltungen und digitalen Schaltungen... -
Beschreiben Sie kurz die Spezifikationen, Verpackungen, das Arbeitsprinzip, die Vorteile und die Umweltauswirkungen von Lithium-Ionen-Batterien

2024/03/20
Seit der Einführung von wiederaufladbaren Blei-Säure-Batterien im Jahr 1859 wurden sie allmählich in den Gewebe des technologischen Fortschritts ei... -
Transistor (BJT und MOSFET) Arbeitsprinzipien

2023/12/20
Arbeitsprinzip des bipolaren Junction -Transistors (BJT)Auswahl der KomponentenwerteWie wählen Sie einen Transistor?Arbeitsprinzip von MOSFETWie scha...
Heiße Teile
- AC0402CRNPO9BN1R8
- 12065C102KAT4A
- 0603YC152JAT2A
- C3216Y5V1A226Z/8
- 1808HA220MAT1A
- 1812SC562MAT1A
- 1812AC103KATRE
- TAJW226K010RNJ
- TAJA475K020H
- SQJ974EP-T1_GE3
- MC100LVE310FN
- MAX3160EAP+
- OPA2227UA
- SN74AUP2G04DCKR
- BQ24261MRGER
- TPS53819ARGTT
- TPS72011DRVR
- STM32F429ZGT6
- 74VHC595MX
- M308B8SGP#U5
- TRS3221ECDB
- TLV431BFTA
- HMC435MS8GE
- TMP102AQDRLRQ1
- LTC3890EUH#PBF
- 6MBR50UA060
- DD60KB80
- PM50100K
- V48A12T500AL3
- MB89053PF-G-129-JNE1
- P80C32SBPN
- W99685FS
- M38049MF-COOFP
- ICS932S208DFLFT
- K4J55323QF-VC20
- XC18V04-VQG44C
- IR3S52N2/T2
- SP3245EEY
- TPS23841PJDRG4
- XRA1201IG24TR-F
- MTFC64GAPALBH-AIT
- MAX6314US26D1+T
- HD6417705V133B
- DCDCA1.O
- CC0603JRNPO8BB103
- ARF912S24
- 1812AA100KAT1A
- SAK-XC2060M-104F80LR

